智能加速团队长期从事实时高速视觉系统的开发,包括多个先端高速相机功能的开发,同时探索实时高速视觉在医疗、机器人、工业等领域的应用前景,积累了丰富的视觉算法研发及设备开发经验。
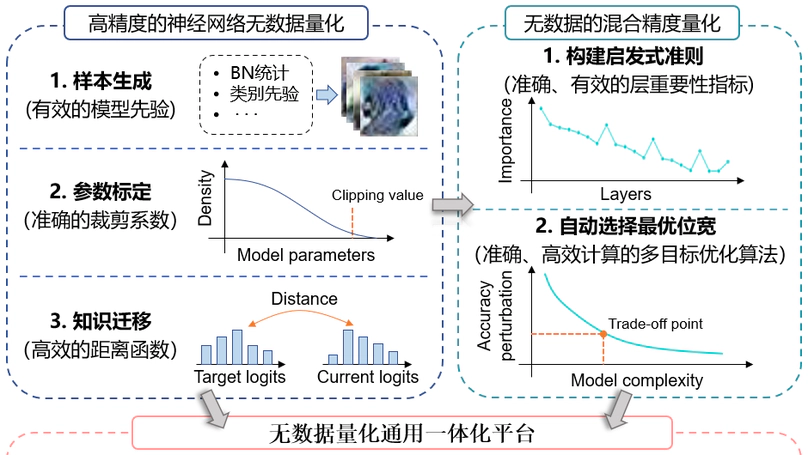
传统加速算法方面,设计了适合硬件实现的省内存的基于单元分割的连通域标记算法,实现了世界最快速的基于高速视觉的多目标追踪识别系统。团队研发的高精度深度神经网络无数据量化方法,结合无数据场景的混合精度量化方法,无需任何数据即可达到与数据驱动的方法相当甚至更好的量化性能。并拓展无数据量化到多种视觉任务和模型结构,开发集成无数据量化通用一体化平台。
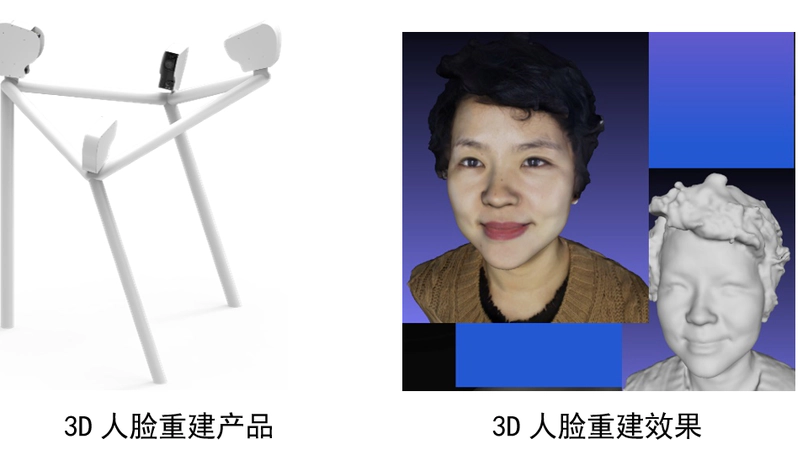
包括人体极速扫描设备与3D数字人、活猪三维重建设备与智慧养殖。团队研发的3D人脸重建产品已经投入量产,模型质量达到影视级数字人3D效果,纤毫毕现。团队研发了一套活猪高速三维重建与点云分析系统,基于结构光三维重建和交叉同步投影技术、点云处理技术、深度学习技术实现对活猪的实时高速三维重建。
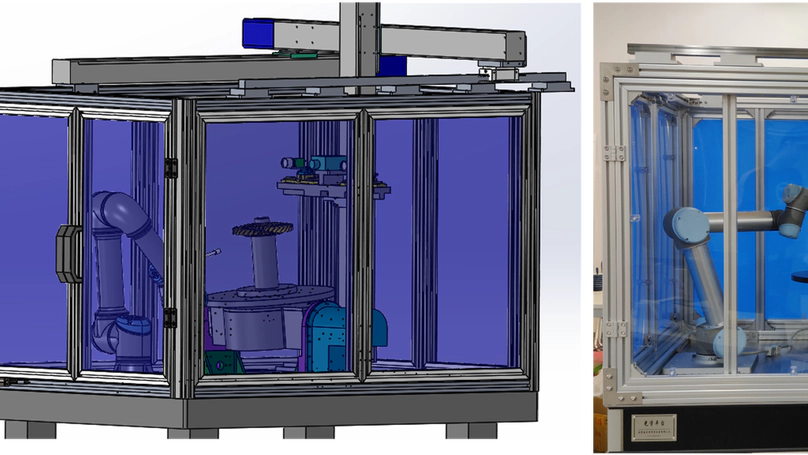
课题组针对航空发动机高温合金损伤构件机器人识别、修复及磨抛全过程智能感知与轨迹规划需求,搭建了一套11轴随形自适应智能3D检测与加工平台。课题组针对智能机器人对未知环境的快速感知需求以及对高动态目标物的识别、跟踪、测量、打击功能需求,研发了一套低惯量、高动态响应、全向双目视觉识别、跟踪、测量、打击系统。