工业机器人
(1)高精度 3D视觉重建与机器人控制
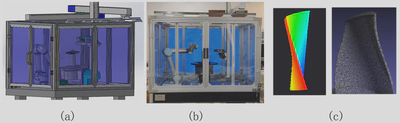
课题组针对航空发动机高温合金损伤构件机器人识别、修复及磨抛全过程智能感知与轨迹规划需求,搭建了一套11轴随形自适应智能3D检测与加工平台,该平台包含自研3D相机一套、自研EtherCAT总线5自由度机器人一套以及6自由度协作机械手一套三大模块,平台如图17所示。在此平台上,课题组突破了高精度稠密点云获取与拼接关键技术,实现了高温合金损伤构件的智能在线感知与快速三维重构;提出了复杂空间曲面流形编码方法,实现了修复/磨抛热变形及应变的在线视觉表征评估;建立了多约束条件下的修复及磨抛路径规划模型,开发出基于多目标优化的路径离散域智能求解算法,自动生成机器人修复及磨抛加工轨迹,为机器人系统在线自适应加工操作提供基础保障。
(2)低惯量、高动态响应、全向双目视觉识别、跟踪、测量、打击系统
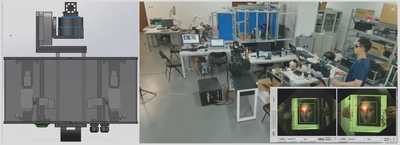
课题组针对智能机器人对未知环境的快速感知需求以及对高动态目标物的识别、跟踪、测量、打击功能需求,研发了一套低惯量、高动态响应、全向双目视觉识别、跟踪、测量、打击系统。在此平台上,课题组突破了低惯量、高机动性视觉系统设计技术,实现了对高动态目标的快速识别与跟踪功能,提出了多光路折叠系统标定原理,开发了长基线双目与打击系统精确标定算法,为智能机器人在非结构化环境下开展识别、跟踪、测量、打击等功能提供了基础与保障。
相关成果
学术论文:
[1] Jianwei Guo, Xuejun Xing, Weize Quan, Dong-Ming Yan, Qingyi Gu, Yang Liu, and Xiaopeng Zhang, Efficient Center Voting for Object Detection and 6D Pose Estimation in 3D Point Cloud, IEEE Transactions on Image Processing (TIP), 2021, 30: 5072-5084, DOI: 10.1109/TIP.2021.3078109.
[2]Tianwei Wu, Xilong Liu, Mengjuan Chen, Qingyi Gu, Wenxiang Qin, Tingyu Yan, Jiawei Lu, Calibration and Measurement of Large Distortion Binocular Camera Based on Fully Connected Neural Network, 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR), Xining, China, pp. 833-838, 2021.
[3] Tadayoshi Aoyama, Takeshi Takaki, Takumi Miura, Qingyi Gu, and Idaku Ishii, Realization of Flower Stick Rotation using Robotic Arm, 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, pp. 5648-5653, 2015, DOI: 10.1109/IROS.2015.7354179.